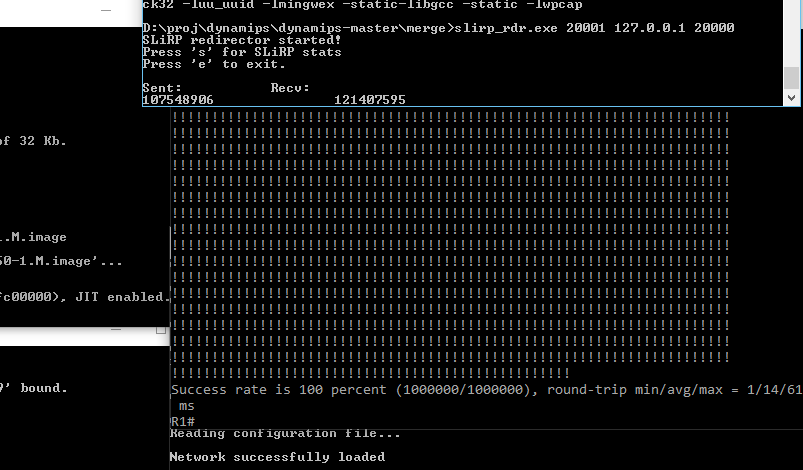
Success rate is 100 percent (1000000/1000000)!
So over in my work on porting Dynamips to MinGW, I’ve created a version of SLiRP that sends and receives data over UDP. Â In retrospect, something I should have done a long time ago, as it makes troubleshooting it easier as now if it were to crash it’s a stand alone program, so it won’t crash the emulator.
The good news is that I’ve been able to copy files into the virtual router using HTTP. Â I’ve even been able to access my OS/2 machine over FTP and load a file!
R1#copy ftp://10.12.0.14/README disk0:
Destination filename [README]?
Accessing ftp://10.12.0.14/README…
Loading README !
[OK – 76743/4096 bytes]
76743 bytes copied in 8.740 secs (8781 bytes/sec)
R1#dir disk0:README
Directory of disk0:/README
12 -rw- 76743 Sep 18 2015 09:01:08 +00:00 README
66875392 bytes total (41652224 bytes free)
Which is very cool!
Part of the ‘trick’ is that you should set your time out to be as long as possible to send a million packets. Â I just set the maximum values.
line con 0
exec-timeout 35791 23
stopbits 1
line aux 0
stopbits 1
line vty 0 4
exec-timeout 35791 0
timeout login response 300
password cisco
login
!
end
In addition, a 7200 with idle performs MUCH better than a 1700 without idle. Â There is something up with ptask, and only dispatching packets every so often. Â I’m guessing it’s done that way for a reason.
Also one other cool IOS trick I learned today is that you can redirect to a file resource! Say you want that ‘show tech-support’ as a file on the disk? No problem!
show tech-support | redirect disk0:tech.txt
And of course the newer versions of IOS have a ‘do’ command that you can run from config mode to execute user commands.
R1(config)#do who
Line User Host(s) Idle Location
* 0 con 0 idle 00:00:00
2 vty 0 idle 15:24:11 10.0.2.2
3 vty 1 idle 14:59:56 10.0.2.2
4 vty 2 idle 13:43:44 10.0.2.2
5 vty 3 idle 11:23:44 10.0.2.2
 Take that Junos!
For anyone interested, the binary is included in the latest binary snapshot, and using it is pretty simple:
slirp_rdr.exe 20001 127.0.0.1 20000
This will listen on port 20001, and send traffic to 127.0.0.1 on port 20000. Â Easy right?
Manually interfacing from the hypervisor can be the ‘fun’ part. Â I haven’t tested with any of the tools, as I don’t know if they will let you leave something ‘listening’ that isn’t connected. For my tests I end up building something with their UI, then loading up my hypervisor that logs, and seeing what it is actually doing so I can inject stuff like this:
nio create_udp nio_udp99 20000 127.0.0.1 20001
ethsw add_nio S1 nio_udp99
ethsw set_access_port S1 nio_udp99 1
This creates a udp nio, and attaches it onto the virtual etherswitch S1, and puts it on VLAN 1. Â As you can see it listens on UDP port 20000, which is where slirp_rdr is setup to send it’s data to, and it’ll send to 20001 where slirp_rdr is listening.
I’ve hard coded port 42323 to telnet into 10.0.2.15. Â As always SLiRP is hard coded to have the following ip address schema:
Gateway 10.0.2.2
DNS 10.0.2.3
Netmask 255.255.255.0
Be sure to set your router to 10.0.2.15/24 for this to work, and add 10.0.2.2 as your default gateway.
The ONLY address that will respond to ping is 10.0.2.2 . Â This is just the way SLiRP is. Â HTTP and TCP based stuff works best, things like PPTP will not. Â It’s really hit and miss, but the cool thing is that it doesn’t require any device drivers, it’s all user mode code!